Blue: Player, Red: Guard
Yellow: Flee, Green: Seek
Yellow: Flee, Green: Seek
A tech demo demonstrating the use of AI decision making techniques and pathfinding algorithms on an isometrical 2D tiled map.
The original intention of this app was to be a isometric mission game similar to classics such as Commandoes or Desperadoes but set in feudal Japan instead (hence the name "Kuno").
This was one of the first large size projects that I had attempted. I quickly realised how daunting of a scope I set for myself.
For this project, I had to implement an AI decision making technique such as a decision tree and a certain pathfinding algorithm. I wanted to challenge myself so I went with behaviour trees, as from what I gathered had the potential to yield better and more complex AI behaviours, although it can be a bit more difficult to write and implement.
The behaviour that I wanted to implement on the enemy characters is fairly complex and I ran into some technical difficulties that unfortunately I couldn't resolve in time. So I ended up simplifying the behaviour so that one enemy would flee, one enemy would seek and another enemy would seek until the player is out of range. At which point it would wait a few seconds and then run back to it's guard post.
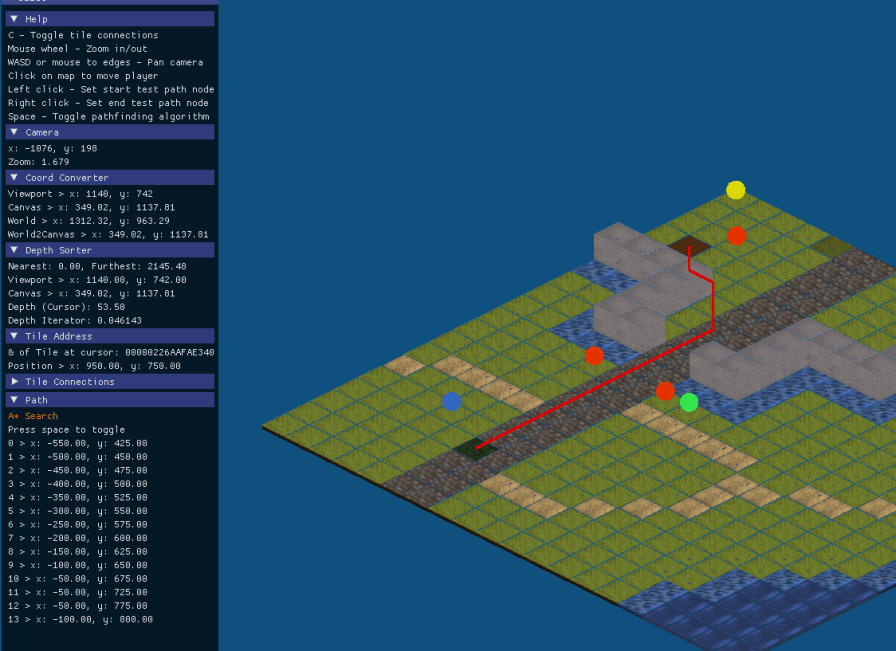
Select between A* or Dijkstra pathfinding
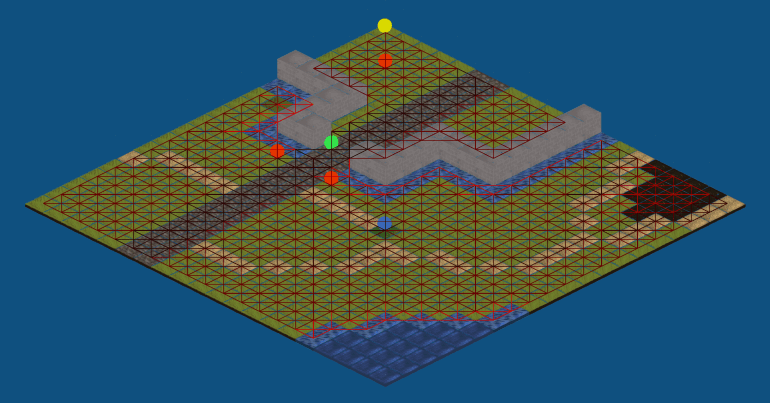
Visualisation of node connections with traversal costs

HTML Editor